| Larissa T. Triess1,2 | David Peter1 | Stefan A. Baur1 | J. Marius Zöllner2,3 |
|
1Mercedes-Benz AG Stuttgart (Germany) |
2Karlsruhe Institute of Technology Karlsruhe (Germany) |
3Research Center for Information Technology Karlsruhe (Germany) |
| In 2021 German Conference on Pattern Recognition (GCPR) |
| [Paper] [Video] |
|
|
|
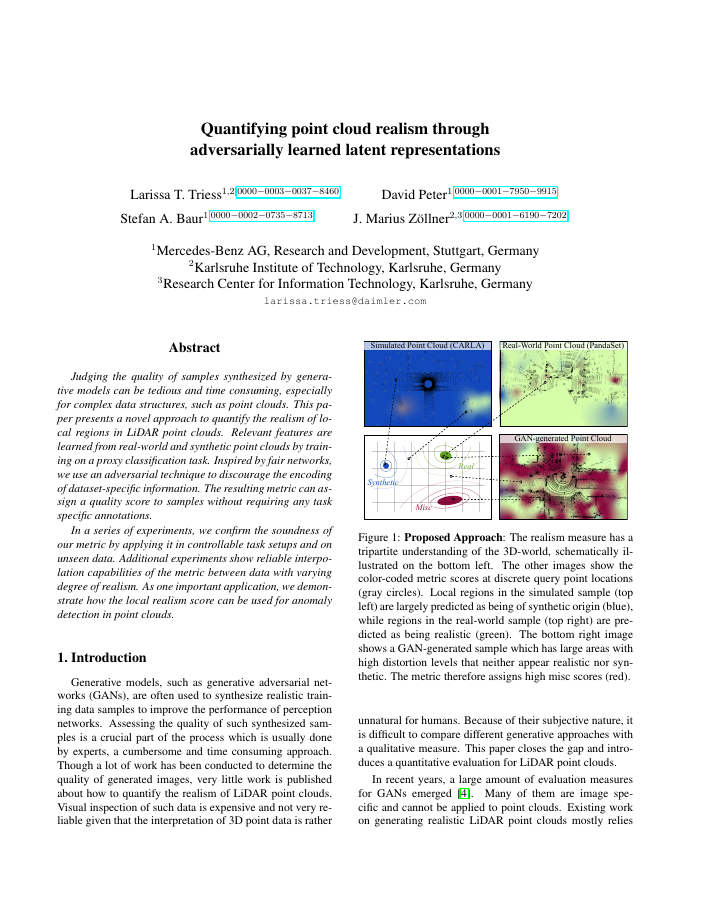
Proposed Approach: The realism measure has a tripartite understanding of the 3D-world, schematically illustrated on the bottom left. The other images show the color-coded metric scores at discrete query point locations (gray circles). Local regions in the simulated sample (top left) are largely predicted as being of synthetic origin (blue), while regions in the real-world sample (top right) are predicted as being realistic (green). The bottom right image shows a GAN-generated sample which has large areas with high distortion levels that neither appear realistic nor synthetic. The metric therefore assigns high misc scores (red). |
|
Judging the quality of samples synthesized by generative models can be tedious and time consuming, especially for complex data structures, such as point clouds.
This paper presents a novel approach to quantify the realism of local regions in LiDAR point clouds.
Relevant features are learned from real-world and synthetic point clouds by training on a proxy classification task.
Inspired by fair networks, we use an adversarial technique to discourage the encoding of dataset-specific information.
The resulting metric can assign a quality score to samples without requiring any task specific annotations.
In a series of experiments, we confirm the soundness of our metric by applying it in controllable task setups and on unseen data. Additional experiments show reliable interpolation capabilities of the metric between data with varying degree of realism. As one important application, we demonstrate how the local realism score can be used for anomaly detection in point clouds. |
@inproceedings{triess2021gcpr,
title = {
Quantifying point cloud realism through adversarially learned latent representations
},
author = {
Larissa T. Triess and David Peter and Stefan A. Baur and J. Marius Z\"ollner
},
booktitle = {Proc. of the German Conference on Pattern Recognition (GCPR)},
year = {2021},
}| The aim of this paper is to provide a reliable metric that gives a quantitative estimate about the realism of generated LiDAR data. The contributions of this work are threefold. First and foremost, we present a novel way to learn a measure of realism in point clouds. This is achieved by learning hierarchical point set features on a proxy classification task. Second, we utilize an adversarial technique from the fairness-in-machine-learning domain in order to eliminate dataset-specific information. This allows the measure to be used on unseen datasets. Finally, we demonstrate how the fine-grained local realism score can be used for anomaly detection in LiDAR scans. |
| The research leading to these results is funded by the German Federal Ministry for Economic Affairs and Energy within the project "KI Delta Learning" (Förderkennzeichen 19A19013A). |