Larissa T. Triess
Machine Learning | Autonomous Driving | Computer Vision

I use machine learning to make autonomous vehicles perceive and understand their environment.
I am a Machine Learning Engineer in the Scene Understanding Group at Mercedes-Benz R&D. I am technical lead of an international software development team for autonomous driving perception that works together with Nvidia to enable L3 high-speed driving on the highway.
At the same time, I am also lecturer at the University of Stuttgart where I am teaching the Master’s course “Advanced Visual Processing” at the department of Electrical Engineering.
Previously, I was a PhD student with the LiDAR Perception Group at Mercedes-Benz R&D and the Karlsruhe Institute of Technology (KIT), where I was advised by Prof. J. Marius Zöllner. My research is published under the title “LiDAR Domain Adaptation - Automotive 3D Scene Understanding”.
news
| Aug 1, 2024 | We are organizing the first workshop for Safe and Robust Robot Learning for Operation in the Real World (SAFE-ROL) at the Conference on Robot Learning (CoRL) in Munich, Germany in November 2024! |
|---|---|
| Apr 1, 2024 | The new semester has started - now with me as a lecturer |
| Feb 14, 2024 | I held a talk about building an end-to-end differentiable stack for automated driving at the Autonomous Driving Meetup in Stuttgart 🚀 |
| Jan 30, 2024 | I will serve as an associate editor as area chair for the workshops of this year’s IEEE Intelligent Vehicles Symposium. |
| Jan 24, 2024 | I was approved to become a lecturer at the Department of Electrical Engineering at the University of Stuttgart 🚀 |
selected publications
-
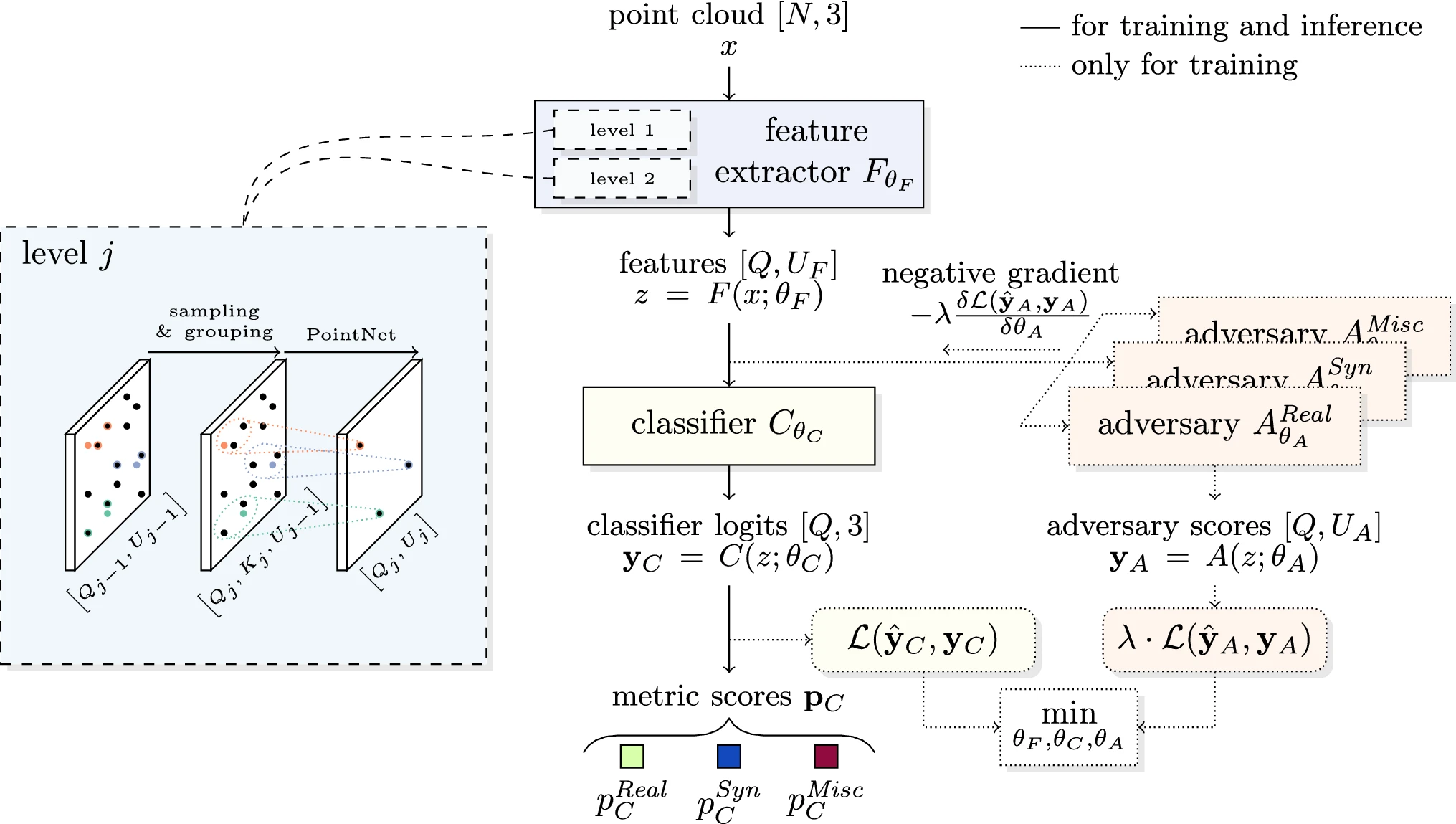 A Realism Metric for Generated LiDAR Point CloudsInternational Journal of Computer Vision (IJCV), 2022
A Realism Metric for Generated LiDAR Point CloudsInternational Journal of Computer Vision (IJCV), 2022
